Spezialgebiete
- Behandlung von Kunststoffen
- Automatik kontinuierlicher Prozesse
- Automatik von Hilfsprozessen
- Automatisierung diskreter Prozesse
- Automatisierung von Produktionsprozessen
- Videosysteme
- Elektrik
- Mechatronik
- Montage
- Montage von Autositzen
- Laufwerke
- Laserbearbeitung
- Metallbearbeitung
- Schaltschränke und Elektroschaltanlagen
- Ausführungsprojekte und Dokumentation
- Robotisierung
- Lösungen für den Materialtransport
- Schweißen
- Fahrzeugmontage
- Zugangskontrolle
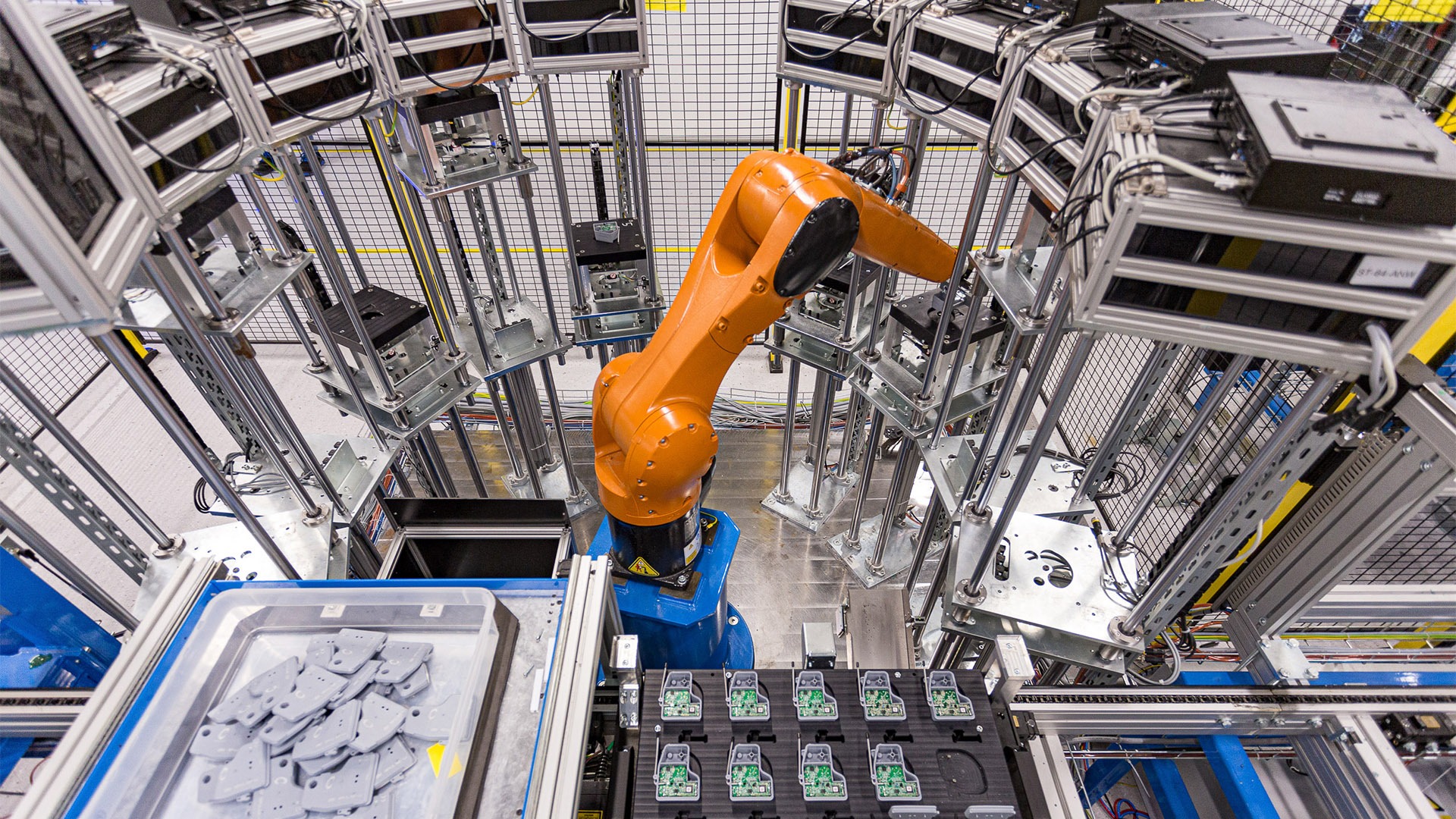
Unser Wissen und die Technologien von AIUT ermöglichen es uns, robotergestützte Produktionslinien und -stationen an Anlagen auf der ganzen Welt zu liefern. Eines unserer Produkte sind autonome mobile Roboter, die den innerbetrieblichen Transport automatisieren.
Die Projekte aus dem Bereich Robotik werden von einem dedizierten Team von mehr als 100 erfahrenen Ingenieuren - Robotikern, Maschinenbauingenieuren, Elektroingenieuren - betreut, die auf den Entwurf und den Bau von robotergestützten Arbeitsstationen und intelligenten mobilen Robotern spezialisiert sind und eine vollständige Anlagenautomatisierung ermöglichen.
Technische Möglichkeiten
Im Rahmen des Robotiklabors von AIUT erstellen und testen wir Lösungen, die auf den neuesten Technologien basieren. Wir bauen robotergestützte Produktionslinien, entwerfen und erstellen robotergestützte Kontroll- und Montagestationen, intelligente, mobile Produktionsstationen und autonome Transportroboter, automatisierte Service- und Palettierstationen. Im Hinblick auf die Integration von robotergestützten Lösungen, sind wir für das Projekt mechanischer, elektrischer, pneumatischer und sicherheitstechnischer Teile sowie für die geeignete Auswahl von Videosystemen verantwortlich. Wir führen Funktionalitätsprüfungen der Roboter, Softwaretests und Offline-Simulationen sowie Service und Instandhaltungsdienstleistungen durch. Unsere Möglichkeiten umfassen u. a.:
- Robotik autonomer AGV-Roboter
- robotergestützte Montage
- Simulation von Roboterzellen
- robotergestütztes Gießen
- robotergestützte Palettierung
- Robotik mit Videonavigation
- Integrationen von kooperierenden Robotern
- Simulation von robotergestützten Stationen
